Oxford Multimotion Dataset (OMD)
Share
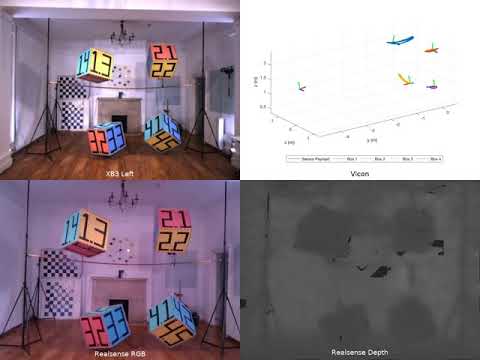
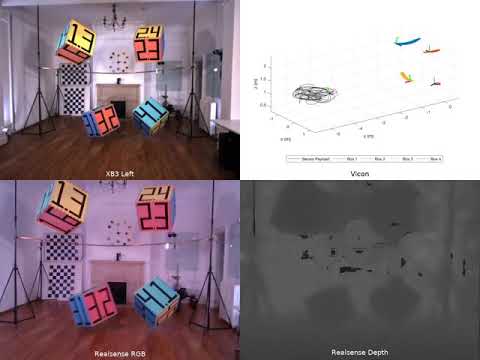
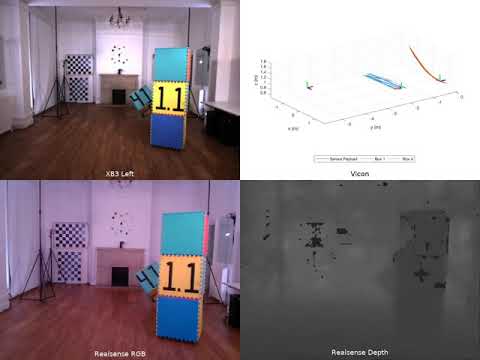
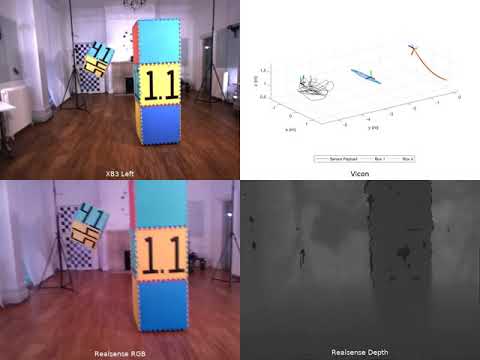
Welcome to the Oxford Multimotion Dataset (OMD). The data are hosted on Google Drive (no sign-in required) and are accessible from either the web folder or the individual file links below.
Documentation
Full documentation of the dataset is available in the associated RA-L paper. Please cite the dataset as:
- Publication
- Journal
- IEEE Robotics and Automation Letters (RA-L)
- Volume
- 4
- Number
- 2
- Pages
- 800–807
- Date
- Notes
- Presented at ICRA 2019
Tools
Useful scripts and tools for manipulating the data and evaluating results are provided here.
Calibration
There are two calibrations for the dataset. All of the primary segments and most of the secondary segments with imu data use the same calibration. The secondary segments without imu data use a separate no_imu calibration.
Each calibration consists of three files:
- Camera intrinsics as provided by the camera manufacturer (manufacturer.yaml)
- Camera intrinsics & extrinsics as estimated by Kalibr using the calibration_extrinsic data segment (kalibr.yaml)
- Transform from the camera frame to the Vicon frame as estimated from the calibration_vicon data segment (vicon.yaml)
Notes and Errata
Here we list the known issues with and updates to the dataset.
- The Vicon transforms are described incorrectly in the paper. They are stored in the CSV as passive transforms from object to world. The accompanying GitHub code is written for passive transforms from world to object and so converts the Vicon transforms on ingestion.
- Some data segments exhibit a small amount of jitter in sections of the Vicon ground-truth data. This can be mitigated through simple interpolation and smoothing.
- Though the stereo camera, RGB-D camera, and IMU were recorded on the same machine, they are not hardware synchronized. The Vicon was recorded on a separate system with an unknown temporal offset and clock drift.
- Updates to dataset files:
- 2019-06-14: Improved calibration parameters for vicon.yaml and kalibr.yaml are now included in the dataset and linked in the segments below. Previous calibrations are still available if desired.
Data
Primary

Secondary


Bibliography
- Publication
- Journal
- IEEE Robotics and Automation Letters (RA-L)
- Volume
- 4
- Number
- 2
- Pages
- 800–807
- Date
- Notes
- Presented at ICRA 2019