ESP @ ICRA 2026 — Real-time incremental planning
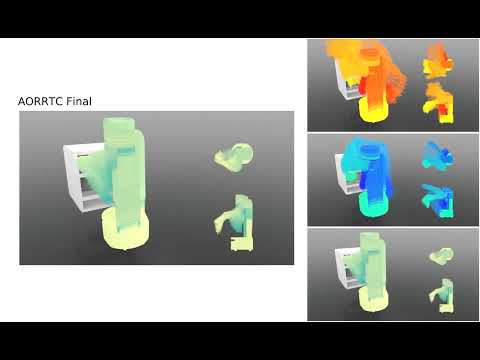
Mitchell and Tyler have an exciting paper on planning in unknown, changing, and dynamic environments at ICRA 2026 in Vienna, Austria. We show that modern a.s.a.o. planners are now so fast that it's often better to just replan from scratch instead of updating an existing plan. This work was in collaboration with Andrew Liu, Joseph Ruan, and Zak Kingston from the CoMMA Lab at Purdue University. We have the open access paper on arXiv, a trailer video on YouTube and we're looking forward to seeing you in Vienna at ICRA!