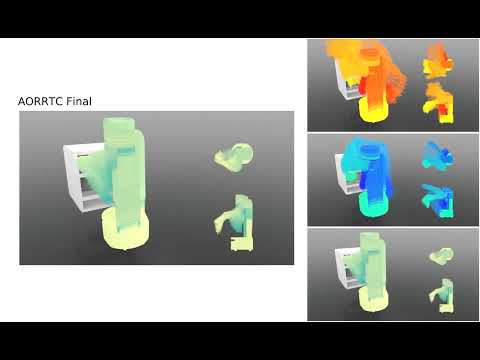
RA-L: Asymptotically Optimal RRT-Connect (AORRTC)
Tyler's paper on asymptotically optimal RRT-Connect (AORRTC) has been published in RA-L. We'll be presenting it with Wil Thomason and Zak Kingston (CoMMA Lab, Purdue University) at ICRA 2026 and are looking forward to seeing everyone in Vienna in June 2026. The paper is already up on on arXiv with an associated video on YouTube and the algorithm available in both VAMP and OMPL.