Planner Developer Tools (PDT)
Share
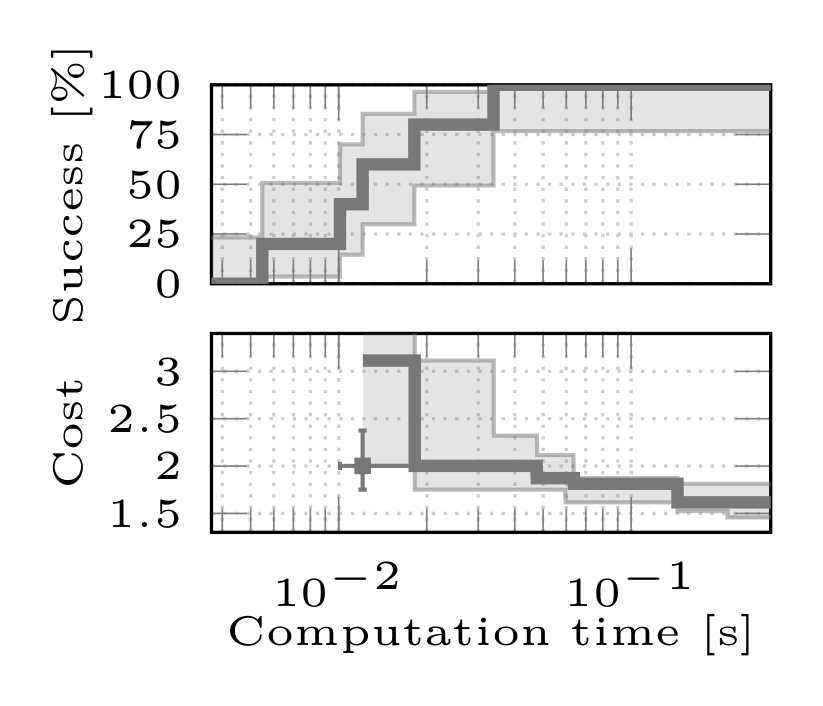
Jonathan has returned from IROS 2022 where ESP released its code for evaluating motion planners at the Workshop on Evaluating Motion Planning Performance (EMPP). Planner Developer Tools (PDT) simplifies experimental design, calculates meaningful nonparametric statistical measures of performance, generates publication-ready figures, and much more. You can find out more about PDT in the short paper or try the code yourself.
- Publication
- Conference
- Proceedings of the Workshop on Evaluating Motion Planning Performance (EMPP), IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
- Location
- Kyoto, Japan
- Date
Abstract
The success of sampling-based planning algorithms has made their design and evaluation a popular area of research. Evaluating different algorithms is complicated due to their use of quasirandom sampling. Experiments and analysis must be designed to calculate probabilistic performance from a finite number of individual trials. This requires careful experimental design and statistical analysis.
Planner Developer Tools (PDT) is a C++ project to make it easier to test, evaluate, and analyze sampling-based planners across problem domains. It provides tools to evaluate Open Motion Planning Library (OMPL) algorithms fairly and also a number of abstract scenarios that isolate specific challenging aspects of the planning problem during algorithm development. It is the result of almost 10 years of development and is available open source to the sampling-based motion planning research community.